
Mạch bảo vệ quá tải 12V 24V : Trong bài đăng này, chúng tôi thảo luận về một số mạch bảo vệ động cơ DC 12V khỏi các điều kiện có hại như quá áp và các tình huống dưới điện áp, quá dòng, quá tải, v.v.
Lỗi động cơ DC thường gặp phải bởi nhiều người dùng, đặc biệt là ở những nơi có động cơ liên quan được chạy nhiều giờ trong ngày. Thay thế các bộ phận động cơ hoặc chính động cơ sau khi hỏng hóc có thể là một việc khá tốn kém, một điều mà không ai đánh giá cao.
Một yêu cầu từ một trong những người theo dõi của tôi đã được đưa ra cho tôi về việc giải quyết vấn đề trên, hãy cùng nghe Mr.Gbenga Oyebanji, bí danh Big Joe.
Thông số kỹ thuật Mạch bảo vệ quá tải 12V 24V
“Nhận thấy tác hại của bộ nguồn đã gây ra cho hầu hết các thiết bị điện của chúng ta, cần thiết phải xây dựng một mô-đun bảo vệ cho các thiết bị của chúng ta để bảo vệ chúng khỏi sự dao động của nguồn điện.
Mục tiêu của đề tài là thiết kế và chế tạo môđun bảo vệ cho động cơ điện một chiều. Do đó, mục tiêu của dự án là
• Thiết kế và chế tạo mô-đun bảo vệ quá áp cho động cơ DC có đèn báo (LED).
• Thiết kế và chế tạo mô-đun bảo vệ điện áp dưới cho động cơ DC có đèn báo (LED).
• Thiết kế và cấu tạo môđun bảo vệ nhiệt độ cho động cơ (Thermistor) với đèn báo (LED).
Mạch bảo vệ động cơ DC khỏi quá áp và dưới điện áp. Một rơ le có thể được sử dụng để bật và tắt tải (động cơ một chiều 12v). Một bộ so sánh được sử dụng để phát hiện xem nó cao hay thấp. Điện áp trên phải là 14V trong khi điện áp dưới phải là 10V.
Mạch chỉnh lưu và lọc cần thiết cũng nên được xây dựng.
Khi phát hiện bất kỳ lỗi nào, các chỉ dẫn cần thiết sẽ được đưa ra.
Ngoài ra khi cuộn từ trường của động cơ bị hở mạch có thể phát hiện ra điều này và đóng động cơ vì khi cuộn từ trường mở thì không còn từ thông trong động cơ nữa và tất cả công suất được cấp trực tiếp cho phần ứng .
Điều này làm cho động cơ chạy cho đến khi nó bị hỏng. (Tôi hy vọng là đúng?). Tôi rất biết ơn nếu nhận được phản hồi của bạn sớm.
Cảm ơn Swagatam. Chúc mừng “
1) Sơ đồ mạch Mạch bảo vệ quá tải 12V 24V
Việc cắt điện áp cao và thấp sau đây đã được tôi thảo luận trước đó trong một bài viết của mình, hoàn toàn phù hợp với ứng dụng trên để bảo vệ động cơ DC khỏi các điều kiện điện áp cao và thấp.

Giải thích toàn bộ mạch được cung cấp mạch điện áp quá / dưới cắt
2) Mạch mô-đun bảo vệ quá nhiệt động cơ DC
Vấn đề thứ ba liên quan đến tăng nhiệt độ của động cơ có thể được giải quyết bằng cách tích hợp mạch chỉ thị nhiệt độ đơn giản sau đây.
Mạch này cũng đã được đề cập trong một trong những bài viết trước đây của tôi.
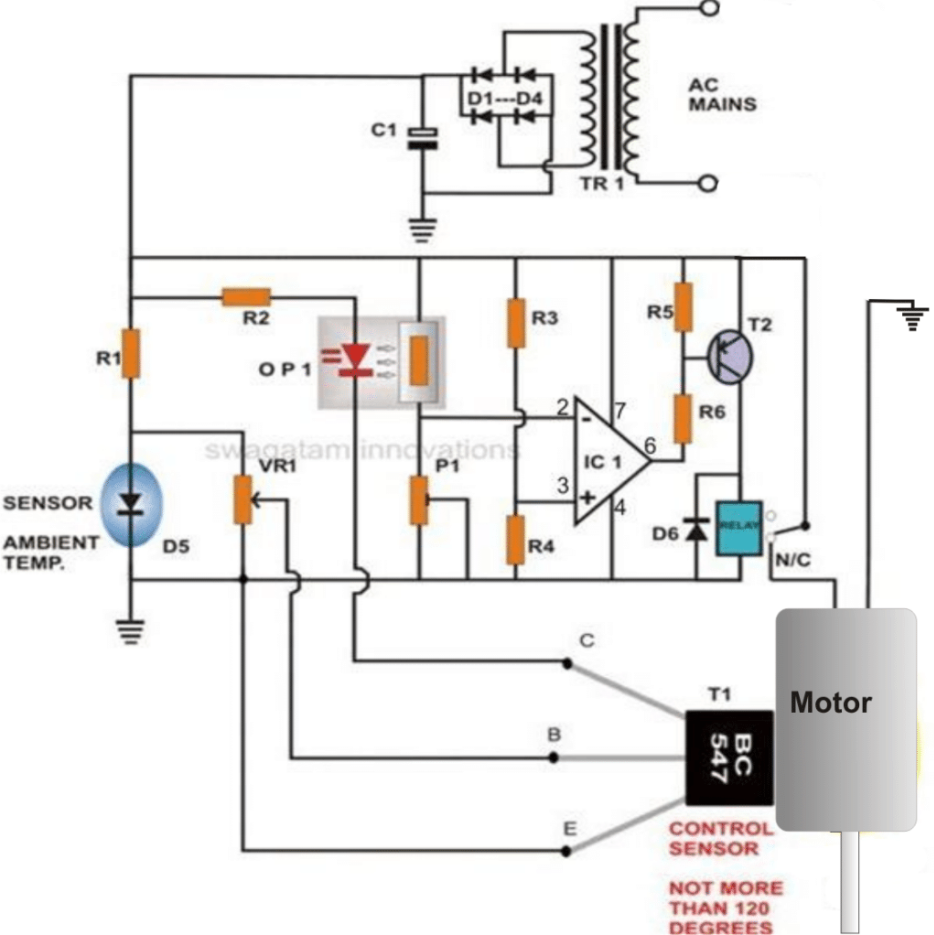
Mạch bảo vệ quá nhiệt ở trên có lẽ sẽ không bao giờ cho phép cuộn dây trường hỏng, vì bất kỳ cuộn dây nào cũng sẽ nóng lên trước khi nung chảy. Mạch trên sẽ TẮT động cơ nếu nó phát hiện thấy bất kỳ sự nóng lên bất thường nào của thiết bị và do đó tránh được bất kỳ lỗi nào như vậy.
Toàn bộ danh sách bộ phận và giải thích mạch được cung cấp TẠI ĐÂY
Cách bảo vệ động cơ khỏi quá dòng
Ý tưởng thứ ba dưới đây phân tích thiết kế mạch điều khiển quá tải dòng điện động cơ tự động.
Thông số kỹ thuật
Tôi cần một số trợ giúp để hoàn thành dự án của mình. Đây là một động cơ 12 volt đơn giản cần được bảo vệ khi nó quá tải.
Dữ liệu được hiển thị và có thể giúp thiết kế nó.
Mạch bảo vệ quá tải nên có các thành phần tối thiểu vì không đủ không gian để thêm nó.
Điện áp đầu vào có thể thay đổi từ 11 vôn đến 13 vôn do chiều dài dây dẫn nhưng quá tải bị cắt có thể xảy ra khi V1 – V2 => 0,7 vôn.
Xin hãy nhìn vào sơ đồ quá tải kèm theo sẽ cắt nếu ampe tăng hơn 0,7 Amp. Ý tưởng của bạn về sơ đồ này là gì. Nó là một mạch phức tạp hay cần phải được thêm một số thành phần?
Phân tích Mạch bảo vệ quá tải 12V 24V
Đề cập đến các sơ đồ điều khiển dòng điện động cơ 12v được vẽ ở trên, khái niệm này có vẻ đúng, tuy nhiên việc triển khai mạch đặc biệt là trong sơ đồ thứ hai có vẻ không chính xác.
Hãy phân tích từng sơ đồ một:
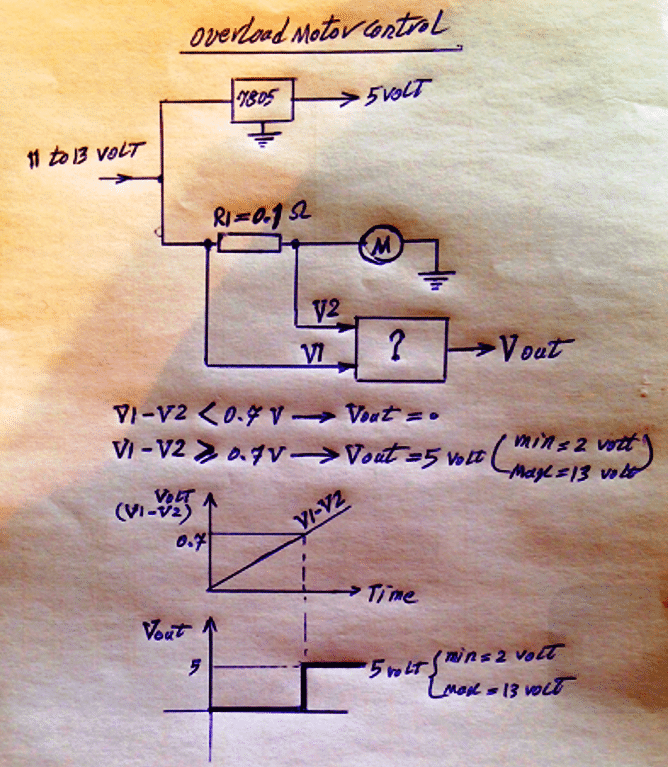
Sơ đồ đầu tiên giải thích các tính toán giai đoạn điều khiển hiện tại cơ bản bằng cách sử dụng opamp và một vài thành phần thụ động, và nó trông rất tuyệt.
Như được chỉ ra trong biểu đồ, miễn là V1 – V2 nhỏ hơn 0,7V, đầu ra của opamp được cho là bằng 0 và thời điểm nó đạt trên 0,7V, đầu ra được cho là tăng cao, mặc dù điều này sẽ hoạt động với một bóng bán dẫn PNP ở đầu ra, không phải với một NPN, …. dù sao thì hãy tiếp tục.
Ở đây, 0,7 V là tham chiếu đến diode được gắn vào một trong các đầu vào của opamp và ý tưởng chỉ đơn giản là đảm bảo rằng điện áp trên chân này vượt quá giới hạn 0,7V để điện thế sơ đồ chân này vượt qua chân đầu vào bổ sung khác của op amp dẫn đến một công tắc TẮT kích hoạt được tạo ra cho bóng bán dẫn điều khiển động cơ đi kèm (bóng bán dẫn NPN được ưu tiên trong thiết kế)
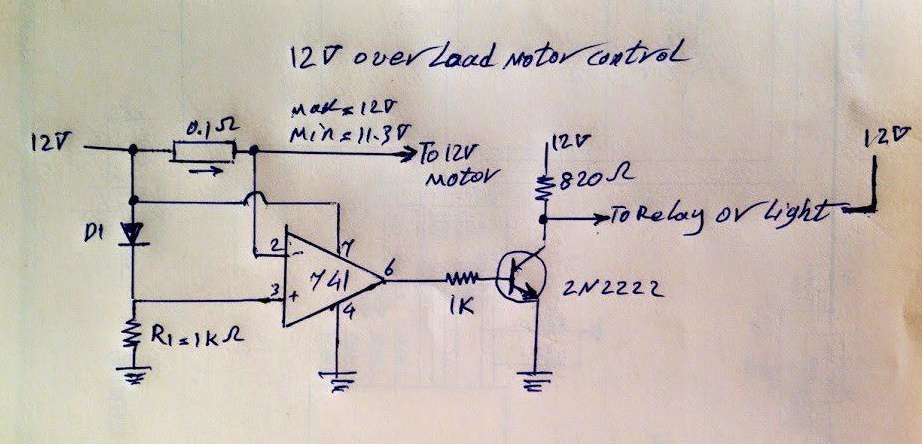
Tuy nhiên trong sơ đồ thứ hai, điều kiện này sẽ không được thực hiện, thực tế là mạch sẽ không phản hồi gì cả, hãy xem tại sao.
Lỗi trong sơ đồ thứ hai
Trong sơ đồ thứ hai khi nguồn được BẬT, cả hai chân đầu vào được kết nối qua điện trở 0,1 ohm sẽ phải chịu một lượng điện áp gần như bằng nhau, nhưng vì chân không đảo ngược có một diode rơi nên nó sẽ nhận được một điện thế có thể Thấp hơn 0,7 V so với chân 2 của IC đảo ngược.
Điều này sẽ dẫn đến đầu vào (+) nhận được điện áp thấp hơn chân (-) của IC, do đó sẽ tạo ra điện thế bằng không tại chân 6 của IC ngay lúc khởi động. Với mức 0 vôn ở đầu ra, NPN được kết nối sẽ không thể khởi động và động cơ sẽ vẫn ở trạng thái TẮT.
Khi động cơ tắt, sẽ không có bất kỳ dòng điện nào được hút bởi mạch và không có sự khác biệt tiềm năng được tạo ra trên điện trở cảm biến. Do đó mạch sẽ không hoạt động mà không có gì xảy ra.
Có một lỗi khác trong sơ đồ thứ hai, động cơ được đề cập sẽ cần được kết nối qua bộ thu và cực dương của bóng bán dẫn để làm cho mạch hoạt động hiệu quả, một rơ le có thể gây ra chuyển mạch đột ngột hoặc tiếng ồn và do đó không cần thiết.
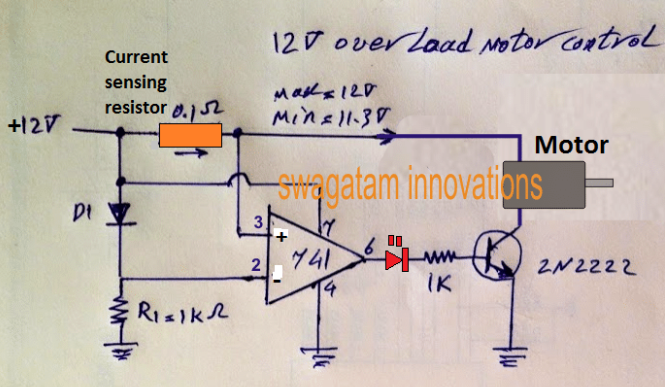
Nếu tất cả một rơ le được tham chiếu, thì sơ đồ thứ 2 có thể được sửa chữa và sửa đổi theo cách sau:
Trong sơ đồ trên, có thể thấy các chân đầu vào của op amp được hoán đổi để op amp có thể tạo ra đầu ra CAO khi khởi động và cho phép động cơ thứ hoạt động. Trong trường hợp động cơ bắt đầu tạo ra dòng điện cao do quá tải, điện trở cảm nhận dòng điện sẽ gây ra điện thế âm cao hơn phát triển ở chân 3, làm giảm điện thế của chân 3 so với tham chiếu 0,7 V ở chân 2.
Điều này đến lượt nó sẽ hoàn nguyên đầu ra op amp về 0 volt TẮT rơle và động cơ, do đó bảo vệ động cơ khỏi các tình huống quá dòng và quá tải.
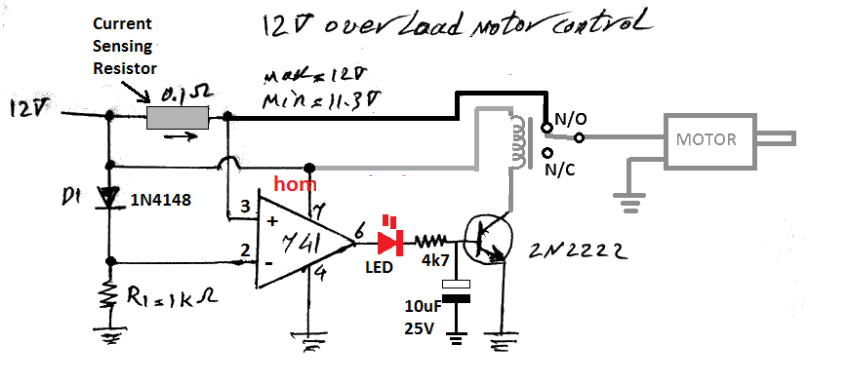
Thiết kế bảo vệ động cơ thứ ba
Đề cập đến sơ đồ thứ ba ngay khi nguồn được BẬT, chân2 sẽ chịu điện thế nhỏ hơn 0,7V so với chân 3 của IC, buộc đầu ra tăng cao khi bắt đầu.
Với đầu ra tăng cao sẽ làm cho động cơ khởi động và đạt được động lượng, và trong trường hợp động cơ cố gắng tạo ra dòng điện nhiều hơn giá trị được chỉ định, một lượng chênh lệch tiềm năng tương đương sẽ được tạo ra trên điện trở 0,1 ohm, bây giờ khi điện thế này bắt đầu chân 3 đang tăng sẽ bắt đầu gặp điện thế giảm và khi nó giảm xuống dưới điện thế pin2, đầu ra sẽ nhanh chóng trở về 0, cắt ổ đĩa cơ sở cho bóng bán dẫn và tắt động cơ ngay lập tức.
Với việc động cơ được TẮT trong thời gian đó, điện thế trên các chân sẽ có xu hướng trở lại bình thường và sẽ khôi phục lại trạng thái ban đầu, do đó sẽ BẬT động cơ và tình huống sẽ tiếp tục tự điều chỉnh thông qua BẬT / TẮT nhanh chóng của bóng bán dẫn trình điều khiển, duy trì kiểm soát dòng điện chính xác đối với động cơ.
Tại sao đèn LED được thêm vào đầu ra Op Amp
Đèn LED được giới thiệu ở đầu ra op amp về cơ bản có thể trông giống như một chỉ báo thông thường để chỉ ra việc cắt bảo vệ quá tải cho động cơ.
Tuy nhiên, nó luân phiên thực hiện một chức năng quan trọng khác là cấm đầu ra op amp bù đắp hoặc rò rỉ chuyển BẬT bóng bán dẫn vĩnh viễn.
Khoảng 1 đến 2 V có thể được mong đợi vì điện áp bù từ bất kỳ IC 741 nào đủ để làm cho bóng bán dẫn đầu ra vẫn ở trạng thái BẬT và làm cho việc chuyển đổi đầu vào trở nên vô nghĩa. Đèn LED ngăn chặn hiệu quả sự rò rỉ hoặc độ lệch từ op amp và cho phép bóng bán dẫn và tải chuyển đổi chính xác theo sự thay đổi khác biệt đầu vào.
Tính toán điện trở cảm biến Mạch bảo vệ quá tải 12V 24V
Điện trở cảm biến có thể được tính như sau:
R = 0,7 / hiện tại
Ở đây như được chỉ định cho giới hạn dòng điện 0,7amp cho động cơ, giá trị của điện trở cảm biến hiện tại R phải là
R = 0,7 / 0,7 = 1 ohm