
Cuộn dây solenoid hoạt động trên cùng một nguyên lý cơ bản như rơ le điện cơ đã thấy trong hướng dẫn trước và giống như các rơ le, chúng cũng có thể được chuyển đổi và điều khiển bằng cách sử dụng bóng bán dẫn lưỡng cực hoặc MOSFET. “Solenoid” là một thiết bị điện từ chuyển đổi năng lượng điện thành lực đẩy hoặc lực kéo hoặc chuyển động cơ học.
Solenoid
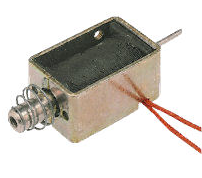
Solenoid về cơ bản bao gồm một cuộn dây điện quấn quanh một ống hình trụ với bộ truyền động sắt từ hoặc “pít tông” có thể tự do di chuyển hoặc trượt “IN” và “OUT” của thân cuộn dây. Solenoid có thể được sử dụng để mở cửa và chốt bằng điện, mở hoặc đóng van, di chuyển và vận hành các chân và cơ chế của robot, và thậm chí kích hoạt các công tắc điện chỉ bằng cách cấp điện cho cuộn dây .
Solenoid có sẵn trong nhiều cấu hình và định dạng nhưng loại phổ biến hơn là Linear Solenoid , còn được gọi là thiết bị chuyển đổi cơ điện tuyến tính (LEMA), như tên gọi của nó tạo ra chuyển động thẳng theo đường thẳng và Rotary Solenoid tạo ra một chuyển động quay trên một số góc cố định.
Cả hai loại Solenoid tuyến tính và quay đều có sẵn ở dạng giữ (được cấp điện liên tục) hoặc dạng chốt (xung BẬT-TẮT) với các kiểu chốt được sử dụng trong các ứng dụng được cấp điện hoặc tắt nguồn. Solenoit tuyến tính cũng có thể được thiết kế để điều khiển chuyển động tỷ lệ thuận với vị trí của pít tông và tỷ lệ với nguồn điện đầu vào.
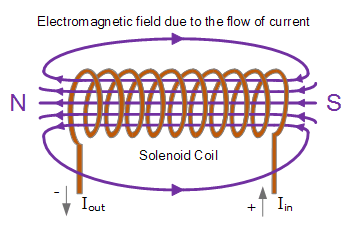
Nguyên lý từ trường bên trong cuộn dây solenoid : Khi dòng điện chạy qua một vật dẫn, nó tạo ra một từ trường xung quanh nó. Hướng của từ trường này liên quan đến cực bắc và cực nam được xác định bởi hướng của dòng điện trong dây dẫn. Sau đó, với dòng điện chạy qua cuộn dây, nó trở thành một “nam châm điện” tạo ra các cực bắc và nam giống hệt như đối với nam châm vĩnh cửu.
Cường độ của từ trường này có thể được tăng hoặc giảm bằng cách điều khiển lượng dòng điện chạy qua cuộn dây hoặc bằng cách thay đổi số vòng hoặc số vòng mà cuộn dây có.
Từ trường được tạo ra bởi một cuộn dây điện từ
Khi một dòng điện chạy qua các cuộn dây cuộn dây, nó hoạt động giống như một nam châm điện và pít tông, nằm bên trong cuộn dây, bị hút về phía trung tâm của cuộn dây bởi thiết lập từ thông trong thân cuộn dây, do đó sẽ nén một lò xo nhỏ gắn vào một đầu của pít tông. Lực và tốc độ chuyển động của các pít tông được xác định bởi cường độ của từ thông sinh ra trong cuộn dây.
Khi dòng điện cung cấp bị “TẮT” (không cung cấp năng lượng), trường điện từ được tạo ra trước đó bởi cuộn dây sẽ sụp đổ và năng lượng tích trữ trong lò xo nén buộc pít tông trở lại vị trí nghỉ ban đầu. Chuyển động qua lại này của pít tông được gọi là “hành trình” của solenoids, nói cách khác là khoảng cách tối đa mà pít tông có thể di chuyển theo hướng “IN” hoặc “OUT”, ví dụ: 0 – 30mm.
Cấu tạo solenoid tuyến tính
Loại solenoid này thường được gọi là solenoid tuyến tính do chuyển động theo hướng tuyến tính và hoạt động của pít tông. Solenoid tuyến tính có sẵn trong hai loại cơ bản được gọi là “Loại kéo” vì nó kéo tải được kết nối về phía chính nó khi được cung cấp năng lượng và “Loại đẩy” hoạt động theo hướng ngược lại khi được cung cấp năng lượng. Cả hai loại đẩy và kéo thường được cấu tạo giống nhau với sự khác biệt là ở vị trí của lò xo hồi vị và thiết kế của pít tông.
Cấu trúc solenoid tuyến tính kiểu kéo
Solenoit tuyến tính hữu ích trong nhiều ứng dụng yêu cầu chuyển động kiểu mở hoặc đóng (vào hoặc ra) chẳng hạn như khóa cửa kích hoạt điện tử, van điều khiển khí nén hoặc thủy lực, rô bốt, động cơ ô tô, van tưới để tưới vườn và thậm chí là “Chuông cửa Ding dong”.
Solenoid quay
Hầu hết các solenoid điện từ là các thiết bị tuyến tính tạo ra lực hoặc chuyển động tuyến tính qua lại. Tuy nhiên, các đế cắm quay cũng có sẵn tạo ra chuyển động góc hoặc chuyển động quay từ vị trí trung hòa theo chiều kim đồng hồ, ngược chiều kim đồng hồ hoặc theo cả hai hướng (hai chiều).

Rotary Solenoid
Các solenoid quay có thể được sử dụng để thay thế động cơ DC nhỏ hoặc động cơ bước khi chuyển động góc rất nhỏ với góc quay là góc di chuyển từ vị trí đầu đến vị trí cuối.
Các loại đế quay phổ biến có sẵn có các chuyển động 25, 35, 45, 60 và 90 o cũng như nhiều chuyển động đến và từ một góc nhất định chẳng hạn như tự phục hồi 2 vị trí hoặc quay trở lại không quay, ví dụ: 0-to-90- đến-0 o , tự khôi phục 3 vị trí, ví dụ 0 o đến +45 o hoặc 0 o đến -45 o cũng như chốt 2 vị trí.
Các solenoit quay tạo ra chuyển động quay khi được cung cấp năng lượng, khử năng lượng hoặc sự thay đổi cực của trường điện từ làm thay đổi vị trí của rôto nam châm vĩnh cửu. Cấu tạo của chúng bao gồm một cuộn dây điện quấn quanh một khung thép với một đĩa từ được kết nối với một trục đầu ra đặt phía trên cuộn dây.
Khi cuộn dây được cung cấp năng lượng, trường điện từ tạo ra nhiều cực bắc và cực nam đẩy các cực từ vĩnh cửu liền kề của đĩa làm cho nó quay theo một góc được xác định bởi cấu tạo cơ học của đĩa điện từ quay.
Các loại đế quay được sử dụng trong máy bán hàng tự động hoặc máy chơi game, điều khiển van, màn trập máy ảnh với tốc độ cao đặc biệt, công suất thấp hoặc các loại đế định vị thay đổi với lực hoặc mô-men xoắn cao có sẵn như được sử dụng trong máy in kim, máy đánh chữ, máy tự động hoặc các ứng dụng ô tô, v.v. .
Solenoid chuyển mạch – Từ trường bên trong cuộn dây solenoid
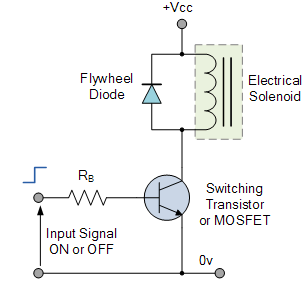
Nói chung, solenoid hoạt động tuyến tính hoặc quay với điện áp một chiều, nhưng chúng cũng có thể được sử dụng với điện áp hình sin xoay chiều bằng cách sử dụng bộ chỉnh lưu cầu để chỉnh lưu nguồn cung cấp mà sau đó có thể được sử dụng để chuyển mạch điện từ một chiều. Solenoid loại DC nhỏ có thể được điều khiển dễ dàng bằng cách sử dụng Transistor hoặc MOSFET và lý tưởng để sử dụng trong các ứng dụng rô bốt.
Tuy nhiên, như chúng ta đã thấy trước đây với rơ le điện cơ, các solenoit tuyến tính là thiết bị “cảm ứng” nên cần có một số hình thức bảo vệ điện trên cuộn dây điện từ để ngăn điện áp emf trở lại cao làm hỏng thiết bị chuyển mạch bán dẫn. Trong trường hợp này, “Flywheel Diode” được sử dụng, nhưng bạn cũng có thể sử dụng điốt zener .
Chuyển mạch Solenoids bằng Transistor
Giảm tiêu thụ năng lượng – Từ trường bên trong cuộn dây solenoid
Một trong những nhược điểm chính của solenoid và đặc biệt là solenoid tuyến tính là chúng là “thiết bị cảm ứng” được làm từ các cuộn dây. Điều này có nghĩa là các cuộn dây điện từ có điện trở và chuyển đổi một số năng lượng điện được sử dụng để vận hành chúng thành “NHIỆT” do hiệu ứng đốt nóng I 2 R của dây.
Nói cách khác, khi được kết nối trong thời gian dài với nguồn điện, cuộn dây có thể nóng lên !, và thời gian nguồn điện được cấp vào cuộn dây điện từ càng lâu, cuộn dây có thể càng nóng hơn. Ngoài ra khi cuộn dây nóng lên, điện trở của nó cũng thay đổi làm giảm cả dòng điện chạy qua cuộn dây và cường độ từ trường của nó vì điều này phụ thuộc trực tiếp vào số vòng của ampe.
Với một đầu vào điện áp liên tục được đặt trên cuộn dây, cuộn dây solenoids không có cơ hội để hạ nhiệt vì nguồn điện đầu vào luôn ở trạng thái bật. Để giảm hiệu ứng đốt nóng tự cảm này, cần phải giảm thời gian cuộn dây được cấp điện hoặc giảm lượng dòng điện chạy qua nó.
Một phương pháp tiêu thụ ít dòng điện hơn là đặt một điện áp đủ cao thích hợp vào cuộn dây điện từ để cung cấp trường điện từ cần thiết để vận hành và đặt pít-tông nhưng sau đó một khi được kích hoạt để giảm điện áp cung cấp cuộn dây xuống mức đủ để duy trì pít-tông. Một cách để đạt được điều này là mắc nối tiếp một điện trở “giữ” phù hợp với cuộn dây solenoids, ví dụ:
Giảm tiêu thụ năng lượng điện từ – Từ trường bên trong cuộn dây solenoid
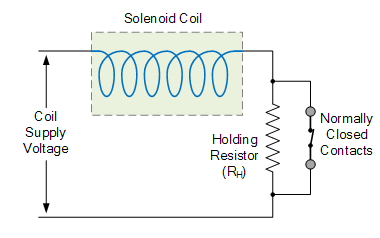
Tại đây, các tiếp điểm của công tắc được đóng lại để rút ngắn điện trở và truyền toàn bộ dòng điện cung cấp trực tiếp đến cuộn dây điện từ. Sau khi được cấp điện, các tiếp điểm có thể được kết nối cơ học với tác động của pit tông , solenoids mở ra kết nối điện trở R H mắc nối tiếp với cuộn dây solenoids. Điều này có hiệu quả kết nối điện trở nối tiếp với cuộn dây.
Bằng cách sử dụng phương pháp này, solenoids có thể được kết nối vô thời hạn với nguồn cung cấp điện áp của nó (chu kỳ làm việc liên tục) vì điện năng tiêu thụ của cuộn dây và nhiệt sinh ra giảm đáng kể, có thể lên đến 85 đến 90% bằng cách sử dụng một điện trở công suất phù hợp. Tuy nhiên, công suất tiêu thụ của điện trở cũng sẽ tạo ra một nhiệt lượng nhất định, I 2 R (Định luật Ohm) và điều này cũng cần được tính đến.
Chu kỳ của solenoids
Một cách khác thực tế hơn để giảm nhiệt do cuộn dây solenoid tạo ra là sử dụng “chu kỳ làm việc gián đoạn”. Chu kỳ làm việc gián đoạn có nghĩa là cuộn dây được chuyển đổi liên tục “BẬT” và “TẮT” ở tần số thích hợp để kích hoạt cơ cấu pít tông nhưng không cho phép nó tắt nguồn trong khoảng thời gian TẮT của dạng sóng. Chuyển đổi chu kỳ làm việc gián đoạn là một cách rất hiệu quả để giảm tổng công suất tiêu thụ của cuộn dây.
Chu kỳ làm việc (% ED) của điện từ là phần thời gian “BẬT” mà điện từ được cấp điện và là tỷ số giữa thời gian “BẬT” trên tổng thời gian “BẬT” và “TẮT” cho một chu kỳ hoàn chỉnh hoạt động. Nói cách khác, thời gian chu kỳ bằng thời gian BẬT cộng với thời gian TẮT chuyển mạch. Chu kỳ nhiệm vụ được biểu thị bằng phần trăm, ví dụ:
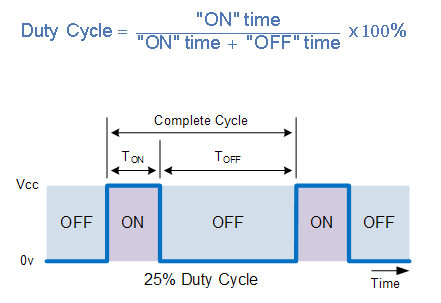
Sau đó, nếu một điện từ được chuyển sang “BẬT” hoặc được cấp điện trong 30 giây và sau đó chuyển sang “TẮT” trong 90 giây trước khi được cấp điện trở lại, một chu kỳ hoàn thành, tổng thời gian chu kỳ “BẬT / TẮT” sẽ là 120 giây, (30 +90) vì vậy chu kỳ nhiệm vụ của solenoids sẽ được tính là 30/120 giây hoặc 25%. Điều này có nghĩa là bạn có thể xác định thời gian BẬT tối đa của solenoids nếu bạn biết các giá trị của chu kỳ làm việc và thời gian TẮT.
Ví dụ: thời gian TẮT chuyển đổi bằng 15 giây, chu kỳ làm việc bằng 40%, do đó thời gian BẬT chuyển đổi bằng 10 giây. Một điện từ có Chu kỳ làm việc danh định là 100% có nghĩa là nó có định mức điện áp liên tục và do đó có thể để ở chế độ “BẬT” hoặc được cấp điện liên tục mà không bị quá nóng hoặc hư hỏng.
Trong hướng dẫn này về solenoid, chúng ta đã xem xét cả Solenoid tuyến tính và Rotary Solenoid như một bộ truyền động cơ điện có thể được sử dụng như một thiết bị đầu ra để điều khiển một quá trình vật lý. Trong hướng dẫn tiếp theo, chúng ta sẽ tiếp tục xem xét các thiết bị đầu ra được gọi là Bộ truyền động và một thiết bị chuyển đổi tín hiệu điện thành chuyển động quay tương ứng một lần nữa bằng cách sử dụng điện từ học. Loại thiết bị đầu ra mà chúng ta sẽ xem xét trong hướng dẫn tiếp theo là Động cơ DC.