
Cảm biến và cơ cấu chấp hành trong điều khiển logic.
Chương này nhằm giúp cho bạn đọc tìm hiểu sơ lược về một số các thiết bị ngoại vi sẽ được kết nối với các ngõ vào ra số của PLC và một số ký hiệu về các thiết bị ngoại vi.
3.1 Cảm biến
3.1.1 Giới thiệu
Cảm biến (sensor) cho phép PLC phát hiện trạng thái của một quá trình. Các cảm biến logic chỉ có thể phát hiện trạng thái đúng hoặc sai. Các hiện tượng vật lý tiêu biểu cần được phát hiện là:
- Tiếp cận cảm: cho biết một đối tượng là kim loại có đến gần vị trí cần nhận biết chưa?
- Tiếp cận dung: cho biết một đối tượng là không kim loại có đến gần vị trí cần nhận biết chưa?
- Sự xuất hiện ánh sáng: Cho biết một đối tượng có làm ngắt chùm tia sáng hay ánh sáng phản xạ?
- Tiếp xúc cơ học: Đối tượng có chạm vào công tắc?
Giá thành của cảm biến ngày càng giảm thấp và trở nên thông dụng. Chúng có nhiều hình dáng khác nhau được sản xuất bởi nhiều công ty khác nhau như Siemens, Omron, Pepperl+Fuch,… Trong các ứng dụng, các cảm biến được kết nối với PLC của nhiều hãng khác nhau, nhưng mỗi cảm biến sẽ có các yêu cầu giao tiếp riêng. Phần này sẽ trình bày cách thức nối dây cho các cảm biến và một số tính chất cơ bản của nó.
3.1.2 Nối dây cảm biến
Khi một cảm biến phát hiện một sự thay đổi trạng thái logic thì nó phải truyền trạng thái thay đổi này đến PLC. Tiêu biểu là việc đóng hoặc ngắt dòng điện hay điện áp. Trong một vài trường hợp, ngõ ra của cảm biến sử dụng để đóng mạch trực tiếp cho tải mà không thông qua PLC. Các ngõ ra tiêu biểu của cảm biến là:
- Sinking/Sourcing: Đóng hoặc ngắt dòng điện
- Switches: Đóng hoặc ngắt điện áp
- Solid State Relays: Chuyển mạch AC
- TTL (Transistor Transistor Logic): Sử dụng điện áp 0V và 5V để chỉ thị mức logic.
3.1.2.1 Switch
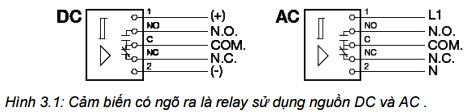
Một ví dụ đơn giản nhất của các ngõ ra cảm biến switch và relay được cho như hình 3.1.
3.1.2.2 Ngõ ra TTL
Ngõ ra TTL có hai mức điện áp: 0V tương ứng là mức thấp, 5V tương ứng mức cao. Điện áp thực tế có thể lớn hơn 0V hoặc nhỏ hơn 5V một chút vẫn có thể phát hiện đúng. Phương pháp này rất dễ bị nhiễu trong môi trường nhà máy cho nên nó chỉ được sử dụng khi cần thiết. Các ngõ ra TTL thường dùng trong các thiết bị điện tử và máy tính. Khi kết nối với các thiết bị khác thì một mạch Schmitt trigger thường được sử dụng để cải thiện tín hiệu (hình 3.2).
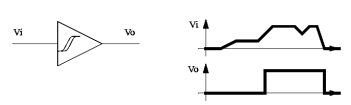
Hình 3.2: Mạch Schmitt trigger
Mạch Schmitt trigger sẽ nhận điện áp ngõ vào giữa 0-5V và chuyển đổi nó thành 0V hoặc 5V. Nếu điện áp nằm trong khoảng 1.5-3.5V thì không chấp nhận. Nếu một cảm biến có ngõ ra TTL thì PLC phải sử dụng các ngõ vào là TTL để đọc các giá trị này. Nếu các cảm biến TTL được sử dụng cho các ứng dụng khác thì nên chú ý dòng ngõ ra cực đại của cảm biến (thường khoảng 20mA).
3.1.2.3 Ngõ ra Sinking/Sourcing
Các cảm biến có ngõ ra Sinking (rút dòng) cho phép dòng điện chạy vào cảm biến. Còn các cảm biến có ngõ ra sourcing (nguồn dòng) cho phép dòng điện chảy từ cảm biến ra đối tượng được kết nối. Ở hai ngõ ra này cần chú ý là dòng điện chứ không phải điện áp. Bằng cách sử dụng dòng điện thì nhiễu được loại trừ bớt.
Khi giải thích về vấn đề sinking hay sourcing thì ta nên quy các ngõ ra của cảm biến tác động như công tắc. Trong thực tế, các ngõ ra của cảm biến thường là một transistor chuyển mạch. Transistor PNP được sử dụng cho ngõ ra sourcing, và transistor NPN được sử dụng cho ngõ vào sinking. Khi giải thích các cảm biến này thì khái niệm “nguồn dòng” thường được dùng cho PNP, và “rút dòng” với NPN. Ví dụ cảm biến ngõ ra sinking được cho ở hình 3.3.
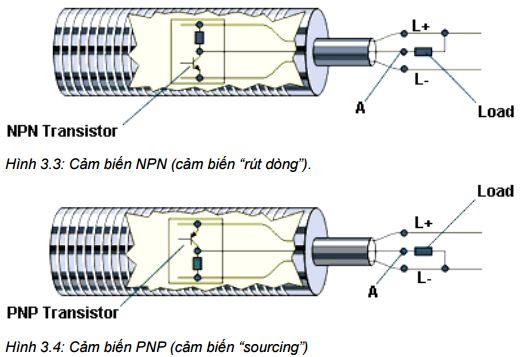
Để cảm biến hoạt động cần phải có nguồn cung cấp (chân L+ và L-). Khi cảm biến phát hiện đối tượng thì có điện áp tại cực B của transistor NPN, transistor chuyển sang trạng thái dẫn và cho phép dòng chảy vào cảm biến xuống mass (chân L-).
Khi không phát hiện đối tượng thì điện áp tại cực B của transistor ở mức thấp (0V), transistor không dẫn. Điều này có nghĩa ngõ ra NPN sẽ không có dòng vào/ra.
Các cảm biến “sourcing” thì ngược với các cảm biến “sinking”. Nó sử dụng transistor PNP (hình 3.4). Khi cảm biến không được kích hoạt thì cực B của transistor ở giá trị L+, và transistor ở trạng thái ngưng dẫn. Khi cảm biến được kích hoạt thì cực B transistor sẽ được đặt ở 0V, và transistor cho phép dòng điện chảy từ cảm biến ra ngoài thiết bị được kết nối.
Hầu hết các cảm biến NPN/PNP có khả năng dòng đến vài ampere, và chúng có thể được sử dụng để nối trực tiếp với tải (luôn luôn kiểm tra sổ tay để biết chính xác dòng điện và điện áp định mức).
Chú ý: Cần phải nhớ kiểm tra dòng điện và điện áp định mức đối với các cảm biến. Khi nối dây các cảm biến cần chú ý đến các chân nguồn. Thường các
chân nguồn có ký hiệu là L+ và COM(chân chung), nhưng đôi khi không có chân COM mà có chân L-. Trong trường hợp này L- là chân chung.
Khi kết nối các cảm biến “sourcing” với các ngõ PLC, thì cần chú ý phải sử dụng các modul ngõ vào loại “sinking”. Thông thường các ngõ vào PLC thường là loại “sinking”.
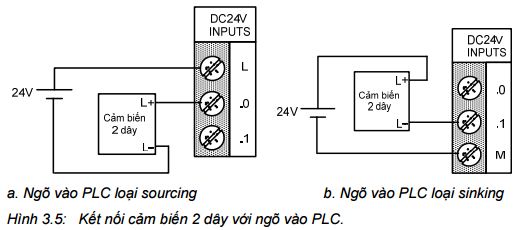
Trong ứng dụng với PLC, để giảm lượng dây nối, thì các cảm biến hai dây thường được sử dụng. Ví dụ về sơ đồ nối dây các cảm biến sử dụng nguồn 24VDC với PLC được chỉ như hình 3.5. Cảm biến hai dây có thể được sử dụng cho cả hai loại ngõ vào sourcing hoặc ngõ vào sinking của PLC.
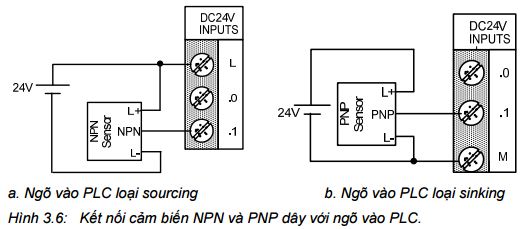
Hầu hết các cảm biến hiện đại có cả hai ngõ ra PNP và NPN. Thông thường cảm biến loại PNP thường được sử dụng cho các ngõ vào PLC.
Trong các bản vẽ thì các chân của các cảm biến NPN và PNP có ký hiệu về màu sắc như sau: dây màu nâu là L+, dây màu xanh dương là L- và ngõ ra thì màu trắng đối với sinking và màu đen đối với sourcing.
Cần lưu ý là khi tiếp điểm trong cảm biến “sinking” đóng thì ngõ ra được nối với COM hoặc L-, tiếp điểm trong sourcing đóng thì ngõ ra nối với L+.
3.1.2.4 Ngõ ra Solid staterelay
Các ngõ ra Solid state relays đóng mạch dòng điện AC. Các cảm biến này được sử dụng với tải lớn.
3.1.3 Phát hiện đối tượng
Có hai cách cơ bản để phát hiện đối tượng: tiếp xúc và tiếp cận (proximity).
Tiếp xúc có nghĩa là tiếp điểm cơ khí cần một lực tác động giữa cảm biến và đối tượng.
Tiếp cận để chỉ báo rằng một đối tượng đang ở gần nhưng không yêu cầu tiếp xúc.
Các phần sau đây sẽ minh họa các kiểu khác nhau của các cảm biến để phát hiện sự hiện diện của các đối tượng. Phần này không đi sâu vào các cảm biến mà chỉ mô tả các nguyên lý trong lĩnh vực ứng dụng.
3.1.3.1 Chuyển mạch tiếp xúc
Chuyển mạch tiếp xúc (contact switch ) thường có hai dạng là thường hở (normally open) và thường đóng (normally closed). Vỏ của chúng được gia cố để có thể chịu được lực cơ tác động nhiều lần.
3.1.3.2 Switches
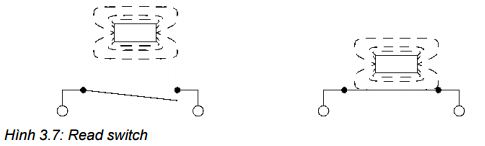
Reed switches thì rất giống relay, ngoại trừ một nam châm vĩnh cửu được sử dụng thay thế cuộn dây. Khi nam châm ở xa thì tiếp điểm mở, nhưng khi nam châm đến gần thì tiếp điểm đóng lại (hình 3.7). Các cảm biến này rẻ tiền và chúng thường được sử dụng cho các màn chắn và cửa an toàn.
3.1.3.3 Cảm biến quang (Optical Sensor)
Cảm biến ánh sáng được sử dụng gần một thế kỷ qua. Nguyên thủy là tế bào quang được sử dụng cho các ứng dụng như đọc các track âm thanh trên các hình ảnh chuyển động. Nhưng các cảm biến quang hiện đại thì phức tạp hơn nhiều.
Các cảm biến quang yêu cầu có cả hai bộ phận là nguồn sáng (phát) và đầu thu (detector). Các đầu phát (emitter) sẽ phát ra các tia sáng trong vùng phổ nhìn thấy và không nhìn thấy được sử dụng LED và diode laser. Đầu thu có cấu tạo là các diode quang (photodidode) hoặc transistor quang (phototransistor). Đầu phát và đầu thu được đặt vào vị trí để đối tượng khi xuất hiện sẽ cắt ngang hoặc phản xạ lại tia sáng. Cảm biến quang đơn giản cho ở hình 3.8.
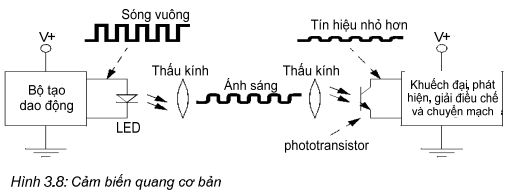
Trong hình, chùm sáng được tạo ra nằm ở bên trái, được hội tụ qua một thấu kính. Đối diện là đầu thu, chùm tia được hội tụ bằng một thấu kính thứ hai. Nếu chùm tia bị ngắt, thì đầu thu sẽ chỉ báo một đối tượng xuất hiện. Ánh sáng được tạo ra dưới dạng xung để cảm biến có thể lọc được ánh sáng bình thường trong phòng. Ánh sáng từ đầu phát được tắt và mở tại một tần số đặt. Khi đầu thu nhận ánh sáng, nó kiểm tra để đảm bảo chắc chắn rằng nó có cùng tần số. Nếu ánh sáng đang nhận được tại tần số đúng thì chùm tia không bị ngắt. Tần số dao động nằm trong phạm vi KHz. Ngoài ra với phương pháp tần số thì các cảm biến có thể được sử dụng với công suất thấp hơn và khoảng cách dài hơn. Đầu phát có thể bắt đầu từ một điểm trực tiếp tại đầu thu, đây còn gọi là chế độ tự phản xạ. Khi tia sáng bị ngắt, thì đối tượng được phát hiện. Cảm biến này cần hai bộ phận riêng (hình 3.9a). Sự xếp đặt này làm việc tốt với các đối tượng chắn sáng và phản xạ với đầu phát và đầu thu được tách riêng với khoảng cách lên đến cả trăm mét.
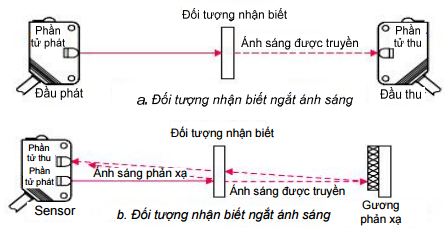
Đầu thu và đầu phát tách riêng làm tăng vấn đề về bảo trì và yêu cầu về sự thẳng hàng. Một giải pháp khác là đầu phát và đầu thu được đặt chung trên một vỏ. Nhưng điều này yêu cầu ánh sáng tự phản xạ trở về (hình 3.9b,c). Các cảm biến này chỉ tốt cho các đối tượng lớn với khoảng cách một vài met.
Trong hình, đầu phát phát một chùm tia sáng. Nếu ánh sáng bị dội trở về từ gương phản xạ thì hầu hết sẽ trở về đầu thu. Khi một đối tượng ngắt chùm tia giữa đầu phát và gương phản xạ thì chùm tia sẽ không tự phản xạ trở về đầu thu và cảm biến được tác động. Một vấn đề rủi ro cho các cảm biến này là các đối tượng tự phản xạ lại chùm tia sáng tốt. Để giải quyết thì sử dụng biện pháp phân cực ánh sáng tại đầu phát (bằng bộ lọc), và sau đó sau đó sử dụng một bộ lọc phân cực tại đầu thu.
3.1.3.4 Cảm biến điện dung (Capacitive Sensor)
Các cảm biến điện dung có thể phát hiện hầu hết các vật liệu với khoảng cách vài cm.
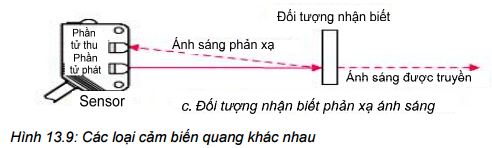
Công thức biểu diễn mối quan hệ điện dung:
Trong cảm biến, diện tích các bản cực và khoảng cách giữa chúng là cố định. Nhưng hằng số điện môi của không gian xung quanh chúng sẽ thay đổi khi các vật liệu được mang đến gần cảm biến. Minh họa ở hình 3.10.
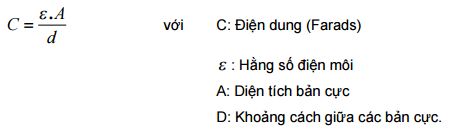
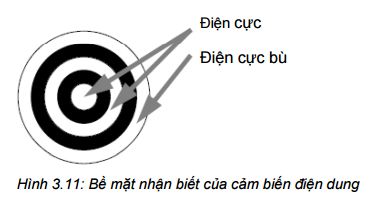
Bề mặt của cảm biến điện dung được hình thành bởi hai điện cực kim loại đồng tâm của một tụ điện. Khi một đối tượng đến gần bề mặt nhận biết nó đi vào vùng điện trường của các điện cực và thay đổi điện dung trong mạch dao động. Kết quả là bộ tạo dao động bắt đầu dao động. Mạch trigger đọc biên độ của bộ dao động và khi đạt đến mức xác định thì trạng thái ngõ ra sẽ thay đổi. Khi đối tượng rời khỏi cảm biến thì biên độ của bộ dao động giảm, cảm biến chuyển về trạng thái bình thường.

Các cảm biến này làm việc tốt đối với chất cách điện (như chất dẻo) có hằng số điện môi cao (làm tăng điện dung). Hằng số điện môi càng lớn thì khoảng cách hoạt động càng cao. Ví dụ khi hiệu chỉnh đúng thì chất lỏng trong thùng chứa có thể được phát hiện được dễ dàng. Tuy nhiên, chúng cũng làm việc tốt đối với kim loại.
Các cảm biến thường được chế tạo với các vòng (không phải bản cực) theo hình 3.11. Trong hình, hai vòng kim loại nằm bên trong là các điện cực của tụ điện, nhưng vòng ngoài thứ ba được thêm vào để bù sự thay đổi. Nếu không có vòng bù này thì cảm biến sẽ rất nhạy cảm với bụi bặm, dầu và các chất khác dính trên cảm biến.
Phạm vi và độ chính xác của các cảm biến được xác định bởi kích thước của chúng. Các cảm biến lớn có thể có đường kính vài centimeter. Cái nhỏ có đường kính nhỏ hơn một centimeter và có phạm vi nhỏ hơn nhưng chính xác hơn.
3.1.3.5 Cảm biến điện cảm (Inductive Sensor)
Các cảm biến điện cảm sử dụng dòng điện cảm ứng để phát hiện đối tượng là kim loại. Cảm biến điện cảm sử dụng một cuộn dây để tạo một từ trường tần số cao được cho ở hình 3.12. Nếu có một đối tượng là kim loại đến gần làm thay đổi từ trường, thì sẽ có dòng chảy vào đối tượng. Dòng chảy này tạo ra một từ trường mới ngược với từ trường ban đầu. Kết quả là nó làm thay đổi độ tự cảm của cuộn dây trong cảm biến. Bằng cách đo độ tự cảm, cảm biến có thể xác định một đối tượng kim loại đến gần.
Các cảm biến này sẽ phát hiện bất kỳ kim loại nào, khi cần phát hiện các loại kim loại thì các cảm biến đa kim loại thường được sử dụng.
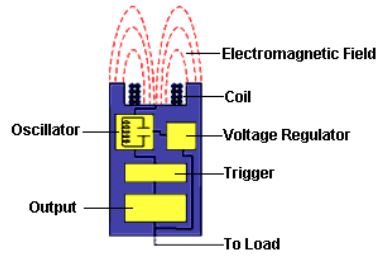
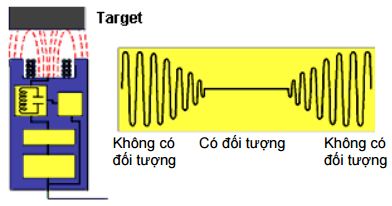
Hình 3.12: Cảm biến tiếp cận điện cảm
Khi đối tượng kim loại đi vào vùng điện từ trường, thì dòng điện xoáy truyền vào đối tượng. Điều này làm tăng tải trong cảm biến, làm giảm biên độ của điện từ trường. Mạch trigger giám sát biên độ dao động khi đạt đến mức định trước thì nó chuyển đổi trạng thái ngõ ra của cảm biến. Khi đối tượng di chuyển khỏi cảm biến, thì biên độ dao động tăng lên. Khi đến giá trị định trước thì mạch trigger chuyển đổi trạng thái ngõ ra trở về điều kiện bình thường.
Hình 3.13: Cảm biến tiếp cận điện cảm
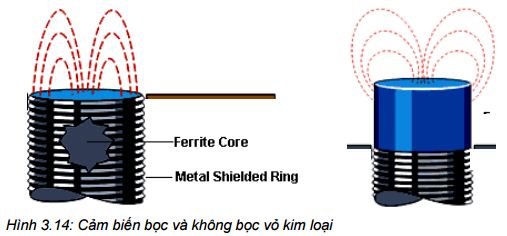
Các cảm biến có thể phát hiện các đối tượng cách xa vài centimeter. Nhưng hướng của đối tượng có thể là bất kỳ như hình 3.14. Từ trường của các cảm biến không bọc bao phủ xung quanh đầu của cuộn dây lớn hơn. Bằng cách lắp thêm vỏ bọc kim loại thì từ trường sẽ nhỏ hơn, nhưng hướng của đối tượng nhận biết được cải thiện hơn.
3.1.3.6 Cảm biến siêu âm (Ultrasonic Sensor)
Cảm biến siêu âm phát ra âm thanh trên ngưỡng nghe bình thường 16kHz. Thời gian được yêu cầu để âm thanh di chuyển đến mục tiêu và phản hồi trở về tỷ lệ với khoảng cách mục tiêu. Có hai loại cảm biến là:
- Tĩnh điện (electrostatic): Sử dụng hiệu ứng điện dung. Phạm vi lớn và băng thông rộng hơn nhưng độ nhạy cao hơn với đối tượng ẩm ướt.
- Áp điện (piezoelectric): Dựa vào phần tử áp điện thạch anh.
Các cảm biến này có thể rất hiệu quả cho các ứng dụng như đo mức chất lỏng trong thùng chứa.
3.1.3.7 Hiệu ứng Hall (Hall Effect)
Các công tắc hiệu ứng Hall cơ bản là các transistor có thể chuyển mạch bởi từ trường. Các ứng dụng của chúng thì rất giống với reed switch, nhưng vì chúng chỉ là chất bán dẫn nên chúng phù hợp với các chuyển động. Các máy móc tự động hóa thường sử dụng chúng để thực hiện khởi động và phát hiện vị trí dừng.
3.1.3.8 Lưu lượng (Fluid Flow)
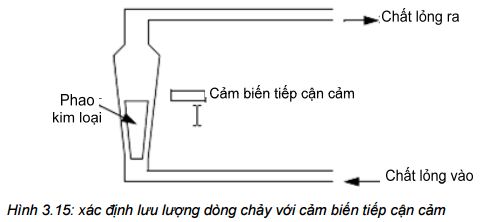
Chúng ta có thể thay thế các cảm biến phức tạp bằng các cảm biến đơn giản. Hình 3.15 cho thấy một phao kim loại trong một kênh hình nón. Tốc độ dòng chảy tăng áp lực đẩy phao lên trên. Dạng hình nón của phao đảm bảo vị trí của chất lỏng tỷ lệ với tốc độ dòng chảy. Một cảm biến tiếp cận điện cảm có thể được định vị để nó phát hiện khi phao đạt đến độ cao nào đó, và hệ thống đạt đến tốc độ dòng chảy đã định.
3.1.4 Tóm tắt
- Cảm biến Sourcing cho phép dòng điện chảy từ cực L+ của nguồn.
- Cảm biến Sinking cho phép dòng điện chảy từ cực L- của nguồn..
- Cảm biến quang có thể sử dụng chùm tia phản xạ, đầu phát và đầu thu và ánh sáng phản xạ để phát hiện đối tượng.
- Cảm biến điện dung có thể phát hiện kim loại và các vật liệu khác.
- Cảm biến điện cảm phát hiện được kim loại.
- Cảm biến hiệu ứng Hall và reed switch có thể phát hiện được nam châm.
- Cảm biến siêu âm sử dụng sóng âm để phát hiện các phần tử cách xa nhiều meter.
3.2 Cơ cấu chấp hành
3.2.1 Giới thiệu
Cơ cấu chấp hành được sử dụng để biến đổi năng lượng điện thành chuyển động cơ học.
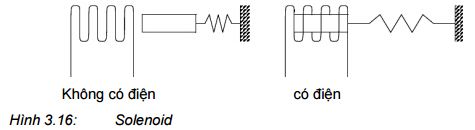
3.2.2 Solenoid
Solenoid là cơ cấu chấp hành thông dụng nhất. Nguyên lý hoạt động cơ bản là sự di chuyển lõi sắt (piston) trong cuộn dây (hình 3.16). Bình thường piston được giữ bên ngoài cuộn dây. Khi cuộn dây được cấp điện, cuộn dây sinh ra từ trường hút piston và kéo nó vào trung tâm của cuộn dây. Ứng dụng quan trọng nhất của solenoid là điều khiển các van khí nén, thủy lực và khóa cửa xe.
Cần chú ý là các cuộn cảm có thể tạo ra điện áp gai nhọn và có thể cần các bộ giảm sốc. Mặc dù vậy hầu hết trong các ứng dụng công nghiệp có điện áp thấp và dòng điện định mức, chúng có thể được kết nối trực tiếp với các ngõ ra của PLC. Hầu hết các solenoid công nghiệp sử dụng nguồn cung cấp 24Vdc và dòng định mức một vài trăm mA.
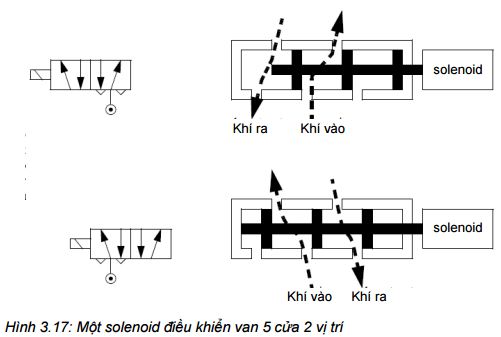
3.2.3 Van điều khiển(VALVE)
Dòng chất lỏng và khí có thể được điều khiển bằng các van điều khiển solenoid. Ví dụ van điều khiển solenoid được cho ở hình 3.17.
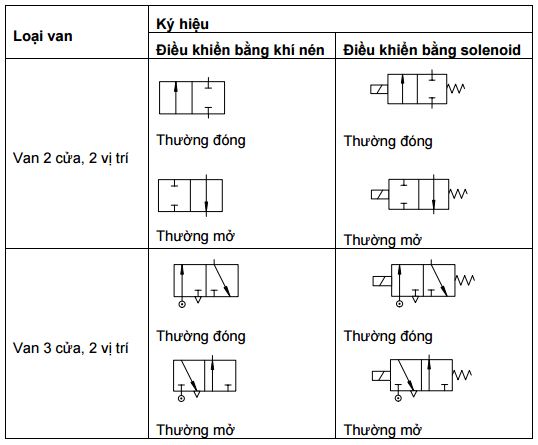
Các loại van được liệt kê dưới đây. Theo tiêu chuẩn, thuật ngữ ‘n-cửa’ (n-cửa) để chỉ định số lượng kết nối các ngõ vào và ra của van. Trong một vài trường hợp có cửa để xả khí ra. Việc thiết kế thường đóng/thường mở cho biết điều kiện van khi mất nguồn cấp.
- Van 2 cửa, 2 vị trí thường đóng (van 2/2): Các van này có 1 cửa vào và một cửa ra. Khi mất nguồn cung cấp thì ở vị trí thường đóng. Khi có nguồn cung cấp, thì van mở cho phép dòng khí hay chất lỏng chảy qua. Các van này được sử dụng để cho phép dòng chảy.
- Van 2 cửa, 2 vị trí thường mở (van 2/2): Các van này có một cửa vào và một cửa ra. Khi mất nguồn thì mở cho phép dòng chảy. Khi có nguồn, van đóng. Các van này được sử dụng để ngắt dòng chảy.
- Van 3 cửa, 2 vị trí thường đóng (van 3/2): Các van này có cửa vào, cửa ra và cửa xả khí. Khi mất nguồn thì cửa ra được nối với cửa xả khí. Khi có nguồn thì cửa vào được nối với cửa ra. Các van này được sử dụng cho các cylinder tác động đơn.
- Van 3 cửa, 2 vị trí thường mở (van 3/2): Các van này có cửa vào, cửa ra và cửa xả khí. Khi mất nguồn thì cửa vào được nối với cửa ra. Khi có nguồn thì van nối cửa ra với cửa xả khí. Các van này được sử dụng cho các cylinder tác động đơn.
- Van 3 cửa, 2 vị trí đa năng (van 3/2): Các van này có 3 cửa. Một trong các cửa hoạt động như là cửa vào hoặc cửa ra, và được nối đến một trong hai cửa khác khi mất nguồn hoặc có nguồn. Các van này có thể được sử dụng để làm chuyển hướng dòng chảy, hoặc chọn nguồn qua lại.
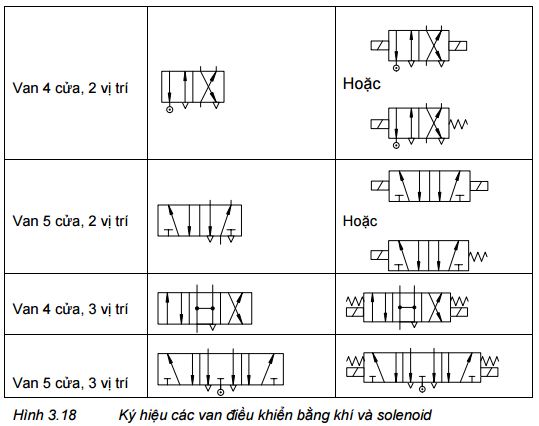
- Van 4 cửa, 2 vị trí (van 4/2): Các van này có 4 cửa, 1 vào, 2 ra và 1 cửa xả khí. Khi có nguồn van nối các cửa vào với các cửa ra và ngược lại. Các van này được sử dụng với các cylinder tác động kép.
- Van 5 cửa, 2 vị trí (van 5/2): Các van này có 5 cửa, 1 vào, 2 ra và 2 cửa xả khí.
- Van 4 cửa, 3 vị trí (van 4/3): Các van này có 4 cửa, 1 vào, 2 ra và 1 xả. Ở trạng thái bình thường (không có nguồn năng lượng) thì các cửa vào/ra đều bị chặn. Van này được sử dụng để điều khiển vị trí các cylinder.
- Van 5 cửa, 3 vị trí (van 5/3): Van này có 5 cửa, 1 vào, 2 ra và 2 cửa xả. Tương tự như van 4/3, van này được sử dụng để điều khiển vị trí các cylinder.
Ký hiệu của các van được cho ở hình 3.18. Khi sử dụng trong các bản vẽ thì vẽ ở trạng thái không được cấp nguồn năng lượng. Mũi tên chỉ đường dẫn dòng chảy đến các vị trí khác. Biểu tượng tam giác nhỏ để chỉ cửa xả khí.
Khi chọn lựa van, cần chú ý một số chi tiết sau:
- Kích thước ống: Cửa vào và ra theo tiêu chuẩn NPT (national pipe thread).
- Tốc độ dòng chảy: Tốc độ dòng chảy cực đại thường được cung cấp cho các van thủy lực.
- Áp suất hoạt động: Áp suất hoạt động cực đại phải được chỉ báo. Một vài van có yêu cầu áp suất tối thiểu để hoạt động.
- Nguồn điện: Các cuộn dây solenoid yêu cầu được cung cấp một điện áp và dòng điện cố định (AC hoặc DC).
- Thời gian đáp ứng: Đây là thời gian để van đóng/mở hoàn toàn. Thời gian tiêu biểu cho các van nằm trong phạm vi từ 5ms đến 150ms.
- Vỏ bọc: Vỏ bọc cho các van được xếp theo loại:
Loại 1 hoặc 2: Sử dụng trong nhà, yêu cầu bảo vệ chống nước. Loại 3: Sử dụng ngoài trời, chống bụi bặm và mưa gió.
Loại 3R hoặc 3S hoặc 4: Chống nước và bụi. Loại 4X: Chống nước, bụi và sự ăn mòn.
3.2.4 Xy lanh(CYLINDER)
Cylinder sử dụng áp lực khí hoặc chất lỏng để tạo lực/chuyển động tuyến tính (hình 3.19). Trong hình, dòng chất lỏng được bơm vào một phía của cylinder làm dịch chuyển piston về phía còn lại. Chất lỏng ở phía này được thoát tự do. Lực tác dụng lên cylinder tỷ lệ với diện tích bề mặt của piston.
Công thức tính lực:
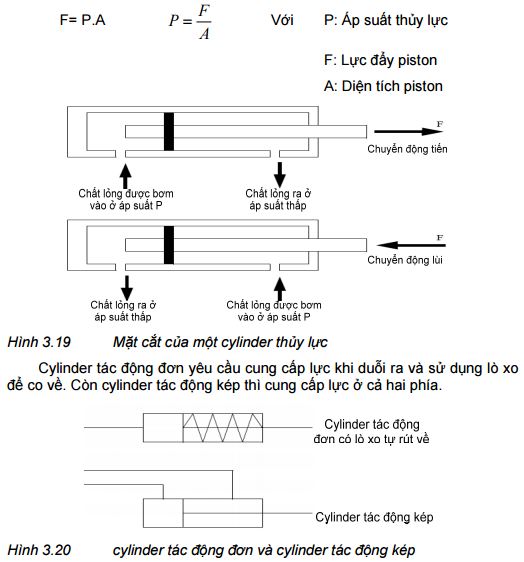
Các cylinder từ thường được sử dụng trong điều khiển khí nén. Trên đầu của piston có một mảnh nam châm. Khi nó di chuyển đến vị trí giới hạn thì các công tắc reed switch sẽ phát hiện ra.
3.2.5 Động cơ
Động cơ là cơ cấu chấp hành thông thường, nhưng đối với ứng dụng cho điều khiển nhị phân thì đặc điểm của nó không quan trọng. Điều khiển logic tiêu biểu của các động cơ là đóng cắt điện cho nó. Các động cơ có dòng điện nhỏ có thể đấu trực tiếp vào các ngõ ra của PLC, còn đối với các động cơ công suất lớn thì sử dụng relay hay contactor hoặc bộ khởi động động cơ. Các động cơ sẽ được khảo sát chi tiết hơn ở chương các cảm biến và cơ cấu chấp hành analog (tập 2).
3.2.6 Các cơ cấu chấp hành khác
Ngoài các cơ cấu chấp hành kể trên còn có nhiều loại cơ cấu chấp hành khác nhau trong điều khiển logic. Một số cơ cấu chấp hành thường được sử dụng relay và contactor.
Ngoài ra có một số cơ cấu chấp hành khác:
- Lò nhiệt: Thường được điều khiển bằng relay, đóng và cắt điện để giữ nhiệt độ nằm trong một phạm vi nào đó.
- Đèn báo: Đèn báo được sử dụng cho hầu hết các máy móc để chỉ báo trạng thái máy và cung cấp thông tin cho người vận hành. Hầu hết các đèn báo có dòng điện thấp và được kết nối trực tiếp đến PLC.
- Còi/chuông báo: Còi hay chuông báo có thể được sử dụng cho các máy móc không được giám sát hoặc đang bị nguy hiểm. Chúng thường được nối trực tiếp với các ngõ ra của PLC.