
Mạch robot bám đường : Bạn đã bao giờ chế tạo robot của riêng mình chưa? Đây là một robot rất đơn giản và dễ dàng. Trong dự án này, tôi sẽ giải thích cách thiết kế và xây dựng một Robot bám đường sử dụng vi điều khiển. Robot đi theo đường là một robot cơ bản đi theo một con đường cụ thể được chỉ ra bởi một đường (thường là đường màu đen trên bề mặt màu sáng) có một số chiều rộng cụ thể.
Nguyên tắc mạch của Robot bám đường
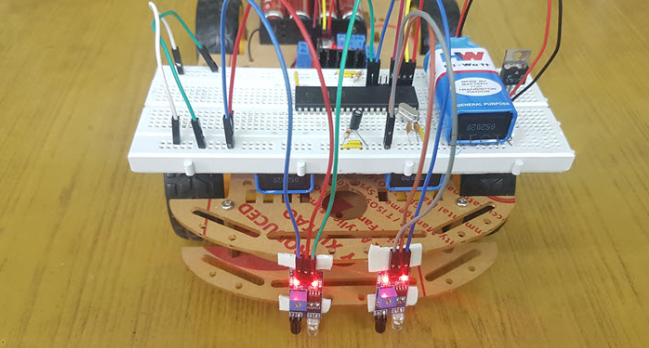
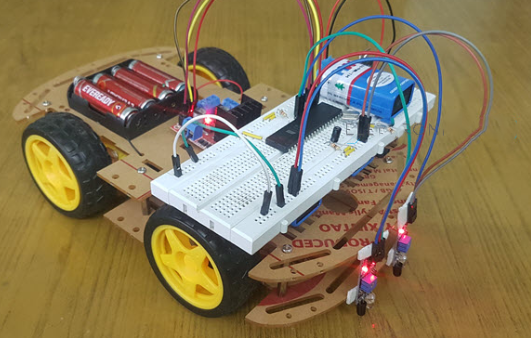
Mạch này chủ yếu bao gồm vi điều khiển 8051, hai cảm biến IR, động cơ và IC điều khiển động cơ (được nhúng trong một mô-đun). Robot theo dõi dòng cần sự sắp xếp cơ học của khung xe. Tôi đã sử dụng khung xe Acrylic 4WD. Hai cảm biến IR được gắn trên cánh quạt của rô bốt hướng về phía trái đất.
Khi robot được đặt trên con đường cố định, nó sẽ đi theo con đường đó bằng cách dò đường. Hướng chuyển động của robot phụ thuộc vào hai đầu ra cảm biến. Khi hai cảm biến nằm trên đường dẫn, robot sẽ di chuyển về phía trước. Nếu cảm biến bên trái di chuyển ra khỏi dòng, robot sẽ di chuyển về bên phải. Tương tự, nếu cảm biến bên phải di chuyển ra khỏi đường dẫn, robot sẽ di chuyển về phía bên trái của nó. Bất cứ khi nào robot di chuyển khỏi đường đi của nó, nó sẽ được phát hiện bởi cảm biến IR.
Cảm biến hồng ngoại bao gồm bộ phát hồng ngoại và bộ thu hồng ngoại trên bảng. Khi xe đang di chuyển trên đường màu đen, các tia hồng ngoại liên tục bị bề mặt màu đen hấp thụ và không có tia phản xạ làm cho đầu ra cao. Bất cứ khi nào, robot di chuyển ra bề mặt trắng, nó bắt đầu phản xạ các tia IR và làm cho đầu ra thấp. Do đó, tùy thuộc vào đầu ra của vi điều khiển cảm biến IR cho biết các động cơ thay đổi hướng của chúng.
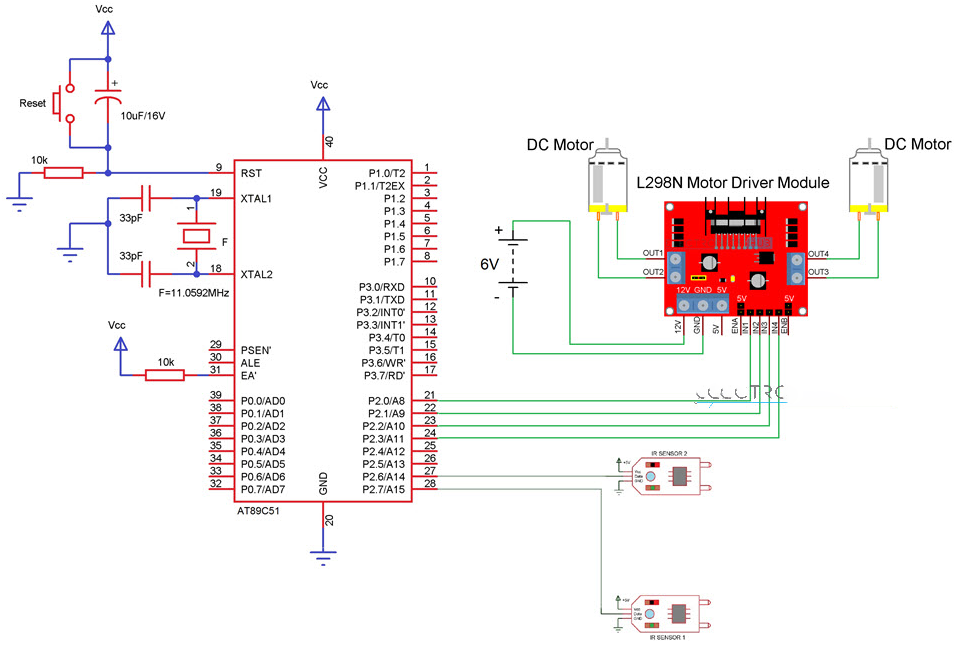
Sơ đồ mạch robot bám đường
Linh kiện trong mạch
- Bộ vi điều khiển 8051
- Ban phát triển cho Vi điều khiển 8051 (ưu tiên)
- Điện trở 10KΩ X 2
- Tụ điện 10µF
- Tinh thể 11.0592MHz
- Tụ điện 33pF X 2
- Nút ấn
- Mô-đun điều khiển động cơ (L298N)
- Khung gầm robot với động cơ
- Cảm biến IR x 2
Làm thế nào để thiết kế một robot bám đường?
Mạch bao gồm vi điều khiển 8051, Cảm biến IR (với bộ phát IR và bộ thu IR), Mô-đun điều khiển động cơ L298N, Khung gầm robot với 4 bánh xe và 4 động cơ, giá đỡ pin.
Vi điều khiển 8051 là thành phần chính của dự án. Nó là một vi điều khiển 8 bit với 32 chân I / O có thể lập trình được. Điều này có nhiều tính năng ngoại vi như UART có thể lập trình, hai bộ định thời / bộ đếm 8 bit, hai ngắt, truy cập bộ nhớ ngoài, v.v.
Động cơ DC của robot được kết nối với bộ điều khiển bằng IC điều khiển động cơ. Vì đầu ra của bộ điều khiển là tối đa 5V với dòng điện rất nhỏ, nó không thể điều khiển động cơ. Vì vậy, để khuếch đại điện áp này IC điều khiển động cơ được sử dụng. L298N có thể điều khiển động cơ lên đến 36v và có thể cung cấp dòng truyền động 3A.
IC điều khiển có 15 chân và thường có sẵn trong Gói 15 đa năng. Các IC này dễ dàng có sẵn trên thị trường dưới dạng Mô-đun. Các đầu vào cho Mô-đun điều khiển động cơ được kết nối với các chân PORT2 P2.0, P2.1, P2.2 và P2.3.
Hai cảm biến IR được kết nối với chân P2.6 và P2.7 của vi điều khiển. Sắp xếp khung gầm và kết nối bốn bánh xe của xe robot với các động cơ lần lượt được kết nối với bộ vi điều khiển.
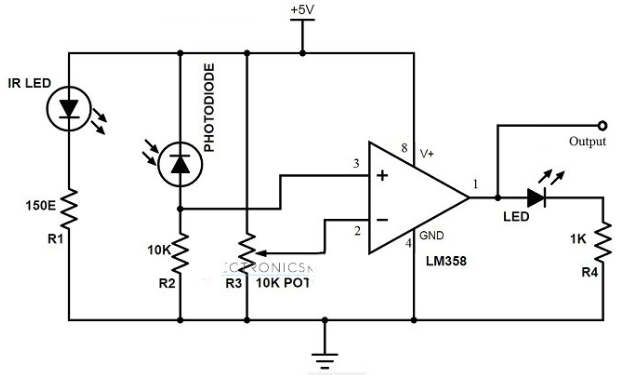
Thiết kế của cảm biến hồng ngoại
Mạch cảm biến IR bao gồm chủ yếu là bộ phát IR và bộ thu IR. Máy phát hồng ngoại tương tự như đèn LED. Điện áp hoạt động của nó là khoảng 1,4V. Vì vậy, để bảo vệ nó, một điện trở 150Ω được đặt nối tiếp với nó và được kết nối theo phân cực thuận. Máy thu IR được kết nối phân cực ngược và một điện trở 10KΩ được đặt giữa VCC và máy thu. Đầu ra được thực hiện giữa điện trở và bộ thu IR.
Vì đây là một đầu ra tương tự, chúng tôi có thể chuyển đổi nó thành kỹ thuật số CAO và THẤP với sự trợ giúp của một vi mạch so sánh đơn giản như LM358 chẳng hạn. Mô-đun cảm biến IR được sử dụng trong dự án này sử dụng cùng một cấu hình và sơ đồ mạch được hiển thị bên dưới.
Hoạt động của cảm biến hồng ngoại
Máy phát IR liên tục truyền các tia IR. Khi máy phát IR ở trên bề mặt màu đen, các tia này đã bị bề mặt hấp thụ và khi ở bề mặt màu trắng thì các tia này bị phản xạ. Máy thu IR có điện trở cực đại khi không nhận được tia IR và điện áp từ VCC chạy qua điện trở. Tại chân đầu ra, điện áp xấp xỉ 5V.
Khi cường độ tia IR nhận được bởi máy thu tăng lên, giá trị điện trở giảm và xảy ra sự phá vỡ ngược lại. Như vậy điện áp qua điện trở được nối đất. Vì vậy, ở chân đầu ra, nó sẽ tạo ra 0V.
Dòng theo mạch xe robot hoạt động
- Ban đầu, vẽ đường dẫn trên bề mặt màu sáng bằng băng dính màu đen.
- Đặt robot trên sàn.
- Bây giờ cấp nguồn cho mạch.
- Robot di chuyển theo đường đã định.
- Khi nó di chuyển ra khỏi đường đi, các cảm biến sẽ kiểm tra nó và tự động điều chỉnh robot.
Code
#include<reg51.h>
sbit mot1=P2^0;
sbit mot2=P2^1;
sbit mot3=P2^2;
sbit mot4=P2^3;
sbit s_left=P2^6;
sbit s_right=P2^7;
void forward (void);
void backward (void);
void left (void);
void right (void);
void forward (void)
{
mot1=0;
mot2=1;
mot3=1;
mot4=0;
}
void backward (void)
{
mot1=0;
mot2=1;
mot3=0;
mot4=1;
}
void left (void)
{
mot1=0;
mot2=1;
mot3=0;
mot4=0;
}
void right (void)
{
mot1=0;
mot2=0;
mot3=1;
mot4=0;
}
void stop (void)
{
mot1=0;
mot2=0;
mot3=0;
mot4=0;
}
void main()
{
s_left=1;
s_right=1;
while(1)
{
if(s_left==0 && s_right==0)
{
forward();
}
else if(s_left==1 && s_right==1)
{
stop();
}
else if(s_left==0 && s_right==1)
{
left();
}
else if(s_left==1 && s_right==0)
{
right();
}
}
}
Các ứng dụng mạch
- Điều này có thể được sử dụng trong hệ thống lái xe ít ô tô với một số tính năng bổ sung như phát hiện chướng ngại vật.
- Điều này cũng có thể được sử dụng trong các ứng dụng công nghiệp và quốc phòng.
Hạn chế
- Robot bám yêu cầu đường rộng 2-3 inch.
- Nó có thể không di chuyển đúng nếu đường đường màu đen quá mờ.
- Các cảm biến IR đôi khi cũng có thể hấp thụ các tia IR từ môi trường xung quanh. Do đó, robot có thể di chuyển không đúng cách.