Cảm biến đo rung và máy đo độ rung là một trong những thiết bị không thể thiếu trong việc bảo trì nhà máy – nhất là các loại động cơ. Trong các bài viết trước đây, chúng tôi đã giới thiệu tổng quan về cảm biến gia tốc và máy đo rung động bằng laser, cũng như ứng dụng của từng loại. Bài viết này sẽ cung cấp cho người đọc thông tin về một số loại cảm biến / máy đo rung phổ biến hiện nay, cấu tạo cũng như ưu/ nhược điểm của chúng.
Xem thêm các bài viết khác về cảm biến đo rung:
Tìm hiểu máy đo rung động bằng laser
Cảm biến gia tốc – Ngày càng gần gũi với hoạt động của con người hơn
Theo ứng dụng:
- Ứng dụng đo rung động công trình hoặc trên vỏ máy móc: dùng gia tốc kế hoặc cảm biến vận tốc rung. Các cảm biến này có thể phát hiện tín hiệu rung động ở tần số cao liên quan đến thân ổ trục, cộng hưởng trên thân vỏ và bệ máy, rung động trong cánh quạt tua-bin hoặc máy nén khí, hư hỏng của trục lăn hoặc bạc đạn, tiếng ồn trong hộp số …
- Ứng dụng đo chuyển vị liên quan đến trục quay: dùng đầu dò tiệm cận. Dùng trong các hệ thống turbine, máy nén ly tâm, hộp số và bộ truyền động, động cơ điện, bơm cỡ lớn (> 300 HP). Các cảm biến này phát hiện chuyển vị tĩnh trên trục, đáp ứng không cân bằng, hiện tượng sai lệch, trục bị uốn cong, bạc đạn quá tải, bất ổn động lực …
Một số loại cảm biến đo rung thông dụng:
- Gia tốc kế
Ưu điểmNhược điểmDễ lắp đặt
Đáp ứng tốt ở tần số cao
Chịu được nhiệt độ cao
Kích thước nhỏ gọn
Nhạy với nhiễu cao tần
Cần có nguồn bên ngoài
Cần tích hợp mạch điện để đo vận tốc rung và chuyển vị
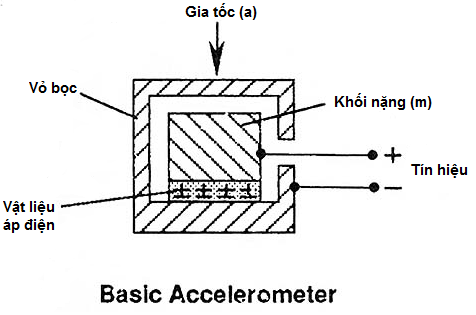
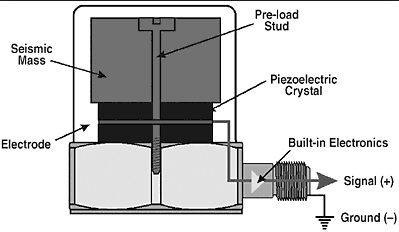
Gia tốc kế là một thiết bị đo rung động, hoặc gia tốc của một chuyển động của một cấu trúc. Lực tạo ra từ rung động hoặc thay đổi về chuyển động (gia tốc) sẽ tác dụng lên vật liệu áp điện (bằng thạch anh hoặc gốm) bên trong, sinh ra một tín hiệu điện tích tỉ lệ với lực tác động và gia tốc. Tùy vào cấu tạo bên trong mà gia tốc kế được phân ra nhiều loại khác nhau.
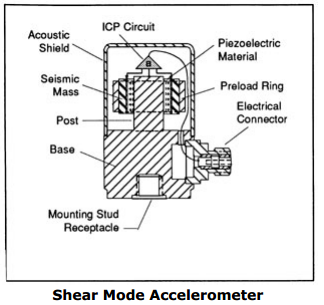
Gia tốc kế dạng trượt (shear mode): phần tử thạch anh nằm giữa giá đỡ và khối địa chấn.
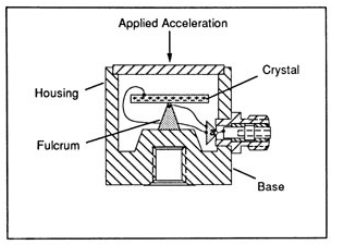
Gia tốc kế dạng uốn cong: phần tử thạch anh bên trong sẽ bị uốn cong khi được gia tốc hoặc có rung động. Thiết kế này giúp cảm biến có kích thước nhỏ gọn, ổn định nhiệt tốt, phù hợp cho các ứng dụng có tần số và mức gia tốc thấp.
Gia tốc kế dạng nén có cấu trúc đơn giản, độ bền cao.
- Cảm biến vận tốc rung
Ưu điểmNhược điểmDễ lắp đặt
Đáp ứng tốt ở dải trung tần
Chịu được nhiệt độ cao
Không cần nguồn bên ngoài
Giá thành rẻ
Cộng hưởng và dịch pha ở tần số thấp
Hiện tượng nhiễu chéo
Kích thước to và nặng
Cần tích hợp mạch điện để đo chuyển vị
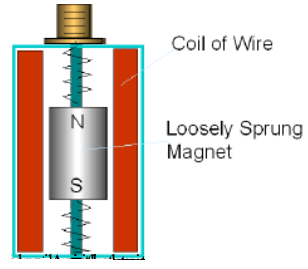
Cảm biến vận tốc rung cấu tạo bao gồm một cuộn dây và một nam châm, được đặt sao cho nếu phần khung di chuyển thì nam châm có xu hướng cố định do quán tính. Chuyển động của nam châm và cuộn dây tạo ra một dòng điện tỉ lệ với vận tốc rung. Phần tử này hoạt động độc lập và không cần nguồn điện hay mạch biến đổi tín hiệu bên ngoài.
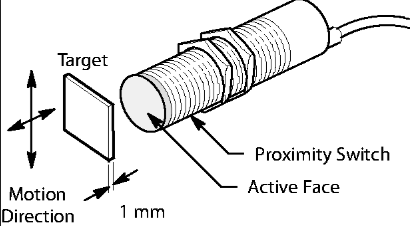
- Cảm biến tiệm cận
Ưu điểmNhược điểmKhả năng đo chuyển vị động và tĩnh
Đáp ứng tốt ở tần số thấp
Không bị hao mòn
Kích thước nhỏ
Giá thành rẻ
Dễ bị nhiễu
Giới hạn ở tần số cao
Không được hiệu chuẩn khi chưa biết vật liệu kim loại
Cần nguồn bên ngoài
Khó lắp đặt
Cảm biến điện dung sử dụng đặc tính điện dung giữa hai bề mặt dẫn điện để đo: khoảng cách giữa hai bề mặt thay đổi dẫn đến thay đổi điện dung.
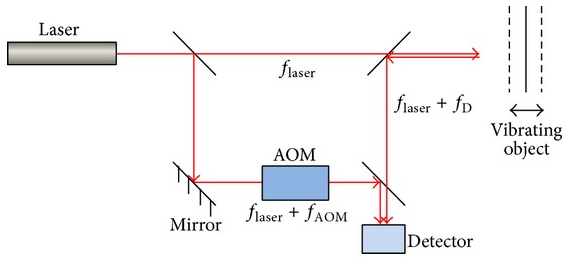
Máy đo rung bằng laser (LDV – Laser Displacement Vibrometer) sử dụng hiệu ứng Doppler để đo rung động trên bề mặt vật thể. Máy đo rung LDV chuyển đổi sự biến thiên của tần số tia laser thành ngõ ra dạng điện áp tương ứng với vận tốc tức thời, và sự biến thiên của pha được chuyển thành tín hiệu tương ứng với độ dịch chuyển hoặc rung động.